PROBLEM#01:
Given the values of R and C, obtain the unit step response of the first order system.
i. R=2KΩ and C=0.01F
SOLUTION:
CODING
R1=2e3;
C1=0.01;
R2=2.5e3;
C2=0.003;
num1=1;
den1=[R1*C1 1];
den2=[R2*C2 1];
sys1=tf(num1,den1);
sys2=tf(num1,den2);
step(sys1,sys2);
legend('system1','system2');
RESULT
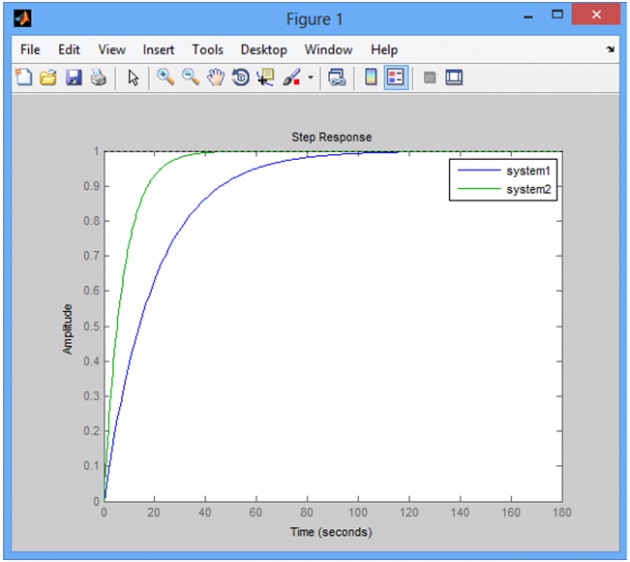
Steady State values are :
t1=R1*C1
t1 = 20
t2 = R2*C2
t2 = 7.5000
//////////////////////////////////////////////////////////////////////////////////////////
PROBLEM#02:
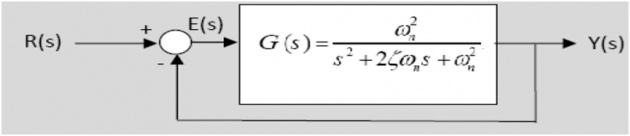
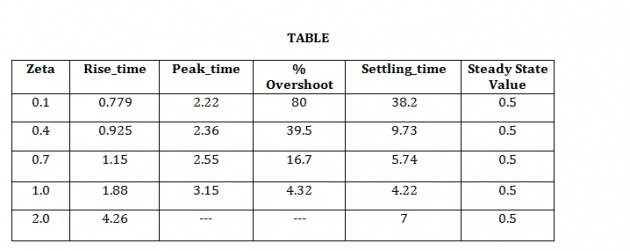
Effect of damping ratio ζ on performance measures. For a single-loop second order feedback system given below

SOLUTION:
a) CODING
In function window
function sys = secondordersystem(wn,zeta)
s=tf('s');sys1= (wn^2)/(s^2 + (2*zeta*wn*s) + wn^2);
sys=feedback(sys1,1);
end
In command window
wn=1;
zeta=0.1; sys1=secondordersystem(wn,zeta);
zeta=0.4; sys2=secondordersystem(wn,zeta);
zeta=0.7; sys3=secondordersystem(wn,zeta);
zeta=1.0; sys4=secondordersystem(wn,zeta);
zeta=2.0; sys5=secondordersystem(wn,zeta);
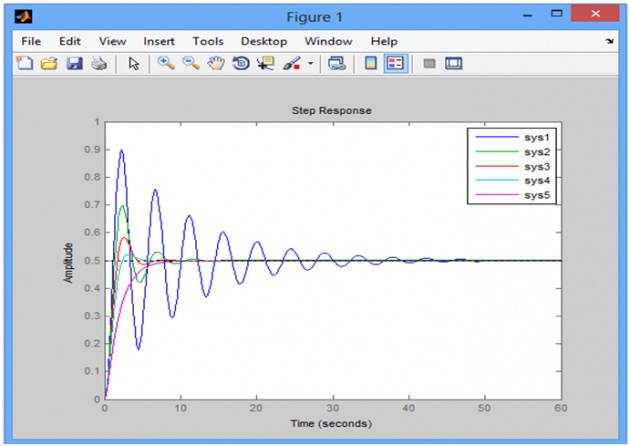
step(sys1,sys2,sys3,sys4,sys5);
legend('sys1','sys2','sys3','sys4','sys5');
RESULT
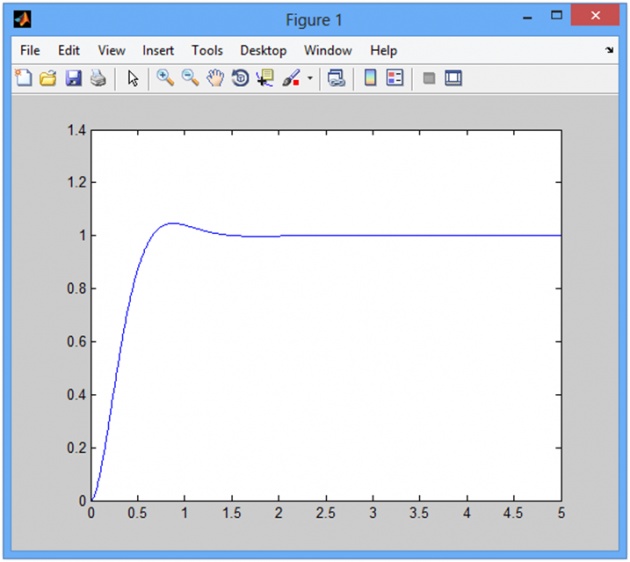
b) CODING
In command window
wn=5; zeta=0.7;
num=[0 0 wn^2];
den=[1 2*zeta*wn wn^2];
t=0:0.005:5;
[y x t]=step(num,den,t);
r=1;
while(y(r)<=0.90)
r=r+1;
end
t1=0.005*(r-1);
r=1;
while(y(r)<=0.10)
r=r+1;
end
t2=0.005*(r-1);
rise_time=t1-t2;
[ymaxtp]=max(y);
peak_time=0.005*(tp-1);
max_overshoot= ymax-1;
s=1000;
while(y>0.98 & y<1.02)
s=s-1;
end
settling_time=0.005*(s-1);
plot(t,y)
RESULT
Written by: Babar Adrees
International islamic uni islamabad (iiui)