- Objective
The objective of this lab is to implement 1st and 2nd order systems first in matlab function method and then using SIMULINK.
- Analysis
- Mass Spring System:

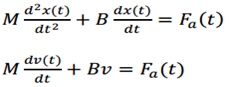
We derive a differential equation for mass spring system.
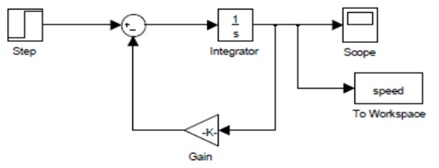
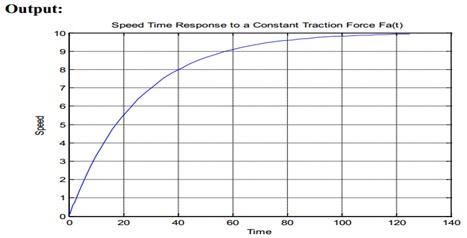
- Speed Control:
Derived differential equation for this as follows:
- Procedure
For Speed control the following are used:
- Constant, Gain, Sum, Intergrator, Scope and To Workspace.
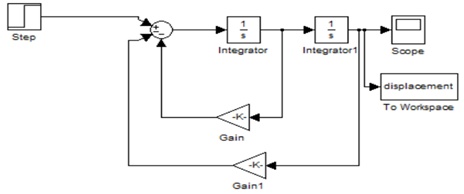
- For Mass Spring System:
- Constant, Gain, Sum, Intergrator, Scope and To Workspace.
- Results
- The output of mass spring system:
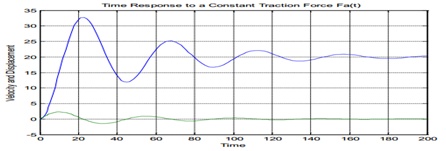
- The output of speed control:
- Conclusion
If we learn the implementation of physical systems and derivation of their differential equations then it is very helpful in projects and on industrial point of view.


