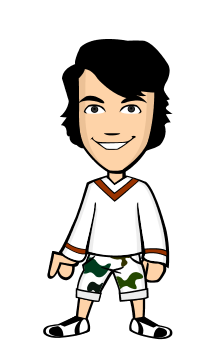
Propeller Circuits:
Main part of Micro COntroller which is called Brain. Following pictures shows the circuit of it.
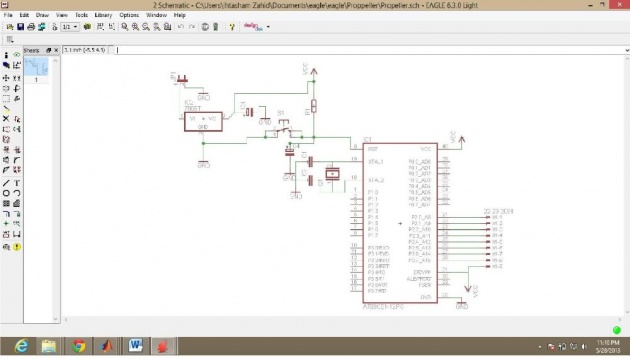
The propeller is made up of 8 LEDs (0.5mm) LEDs that are
Connected in active low manner i-e the anodes of all LEDs are connected together and further connected +5V with a 330Ω of current limiting resistor, and cathode of each led is connected to the each port pin of the controller.
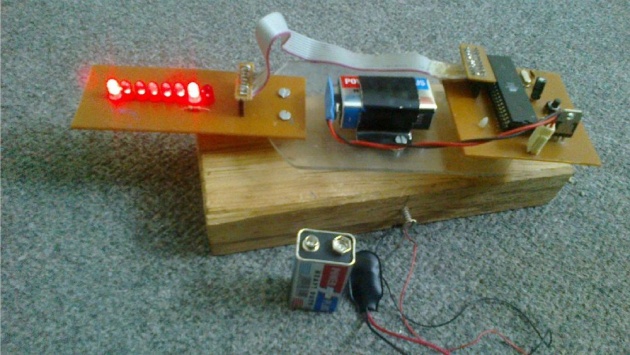
Mechanical Design:
The display of propeller is scanned each time, by rotating the whole assembly in a circular path.
Following picture give us the detail of Mechanical part.
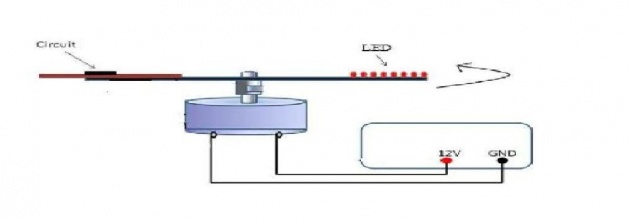
Here, one major challenge how how to bring +5V supply to the ISPnning circuit. That is combining the battery to the rotating platform.
Blood of µ_Heart(Code):
The code is written in a static manner that is it will show the text “FET-IIUI”. Mapping of letters done in the case statements, we can display any letter by making their mapping in a similar manner. The code is in written here in column form.
#include<AT89x51.h> char x;
void delay (void)
{
TMOD=0x10;
TL1=0x90;
TH1=0xFE;
TR1=1;
while(TF1==0);
TF1=0;
TR1=0;
P3=~P3;
}
void disp(x)
{
switch(x)
{
case' ':
{
P2=0xFF;
delay();
P2=0xFF;
delay();
P2=0xFF;
delay();
P2=0xFF;
delay();
P2=0xFF;
delay();
}
break;
case 'F':
{
P2 = 0x01; delay (); P2 = 0x6E; delay (); P2 = 0x6E; delay (); P2 = 0x6E; Delay (); P2 = 0x7E; delay ();
}
break;
case '1':
{
P2 = 0xEF; delay (); P2 = 0xCE; delay (); P2 = 0xEF; delay (); P2 = 0xEF; delay (); P2 = 0x83; delay ();
}
break;
case 'E':
{
P2 = 0x01; delay (); P2 = 0x6D; delay (); P2 = 0x6D; delay (); P2 = 0x6D; delay (); P2 = 0x7D; delay ();
}
break;
case 'T':
{
P2 = 0x7F; delay (); P2 = 0x7F; delay (); P2 = 0x01; delay (); P2 = 0x7F; delay (); P2 = 0x7F; delay ();
}
break;
case '/':
{
P2 = 0xFB;
delay ();
P2 = 0xF7;
delay ();
P2 = 0xEF;
delay ();
P2 = 0xDF;
delay ();
P2 = 0xBF;
delay ();
}
break;
case 'I':
{
P2 = 0x7D;
delay ();
P2 = 0x7D;
delay ();
P2 = 0x01;
delay ();
P2 = 0x7D;
delay ();
P2 = 0x7D;
delay ();
}
break;
case '-':
{
P2 = 0xEF;
delay ();
P2 = 0xEF;
delay ();
P2 = 0xEF;
delay ();
P2 = 0xEF;
delay ();
P2 = 0xEF;
delay ();
}
break;
case 'U':
{
P2 = 0x01;
delay ();
P2 = 0xFD;
delay ();
P2 = 0xFD;
delay ();
P2 = 0xFD;
delay ();
P2 = 0x01;
delay ();
}
break;
}
}
void main (void)
{
P2 = 0x00;
while(1)
{
disp('F');
disp(' ');
disp('1');
disp(' ');
disp('1');
disp(' ');
disp('/');
disp(' ');
disp(' ');
disp(' ');
disp('F');
disp(' ');
disp('E');
disp(' ');
disp('T');
disp('-');
disp('I');
disp(' ');
disp('I');
disp(' ');
disp('U');
disp(' '); disp('I'); disp(' '); disp(' '); disp(' ');
}
}